Blog: Build your own Hangglider and Paraglider Winch
Menu
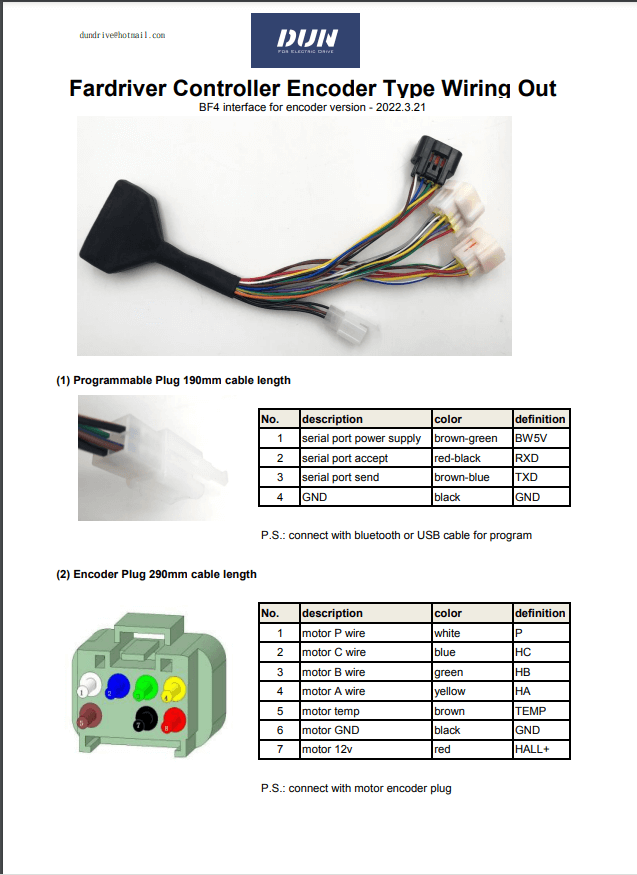
Fardriver Inverter ND72850
This is the Fardriver inverter ND72850, that controls the main motor. Fardriver is a very popular inverter due to its easy setup and still has a lot of advanced function. It has an App where you can setup all parameters. On youtube there are a lot of videos showing how it works.