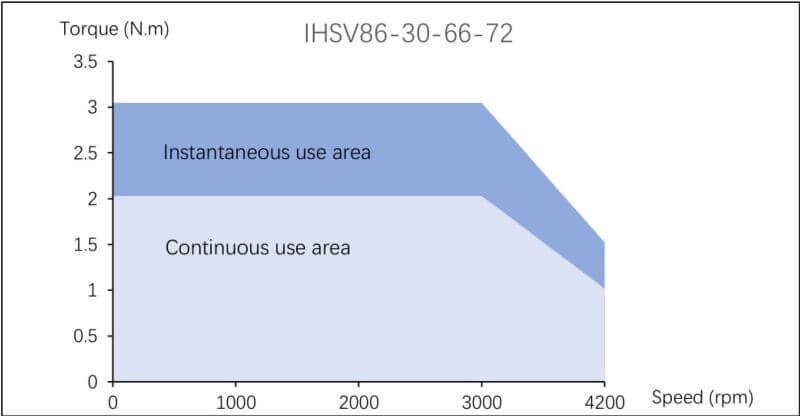
Sled Blog: Build your own Hangglider and Paraglider Winch Menu Main Drum Sled Wirecut Motor/Drive Battery Drawings Schematics PLC Program Components Design of sled Servo motor The servo motor is a key component in the design and a very easy, lowtech way of achieving absolut synchronous positioning. Read more about the 660W servo motor right here. Libraries are availiable in Codesys to convert a 32bit positioning reference signal in the PLC program to the pulse- and direction signal at the output of the PLC.See the PLC-program for more details.